本研究室では,認識行動システムによる高速かつ柔軟な作業の実現を目指し,視覚認識と運動制御を統合的に解析・設計するビジュアルサーボを中心テーマとして,高速ビジョンシステムの開発,生物の移動やインタラクションの原理解明など,基礎・理論とシステム開発・応用の両面からの研究に取り組んでいます
ビジュアルサーボ
視覚情報処理の過程とシステムのダイナミクスを結合する理論的な枠組みをビジュアルサーボと呼びます。この枠組みのもとで,フィードバック制御に適した特徴量抽出手法やキャリブレーション誤差にロバストなロボット・カメラ系の構成法を提案しています.また近年では,生成AIにより目標画像を生成することで,特徴量ベースビジュアルサーボで課題となっていた目標画像作成の事前ステップを省略する応用手法の研究にも取り組んでいます。
3次元計測
人間は左右の目からの情報で実世界を3次元的に認識しています。これをプロジェクタやカメラを用いて再現し,実世界の3次元情報を取得することで,三次元的なビジュアルサーボが可能となります。近年では,製造現場の品質検査や形状評価などでも,高精度な三次元計測への需要が高まっています。
本研究室では,三次元計測技術の一つとしてラインスキャナを用いた走査計測に取り組んでいます。多関節ロボットアーム先端にラインスキャナを搭載して対象物を走査し,各スキャン結果を統合して三次元点群を生成します。また,理論軌道と実軌道のずれに起因する点群歪みを,取得データの整合性を手がかりに把握・低減し,高精度な三次元計測と三次元ビジュアルサーボ・品質検査への応用を目指しています。
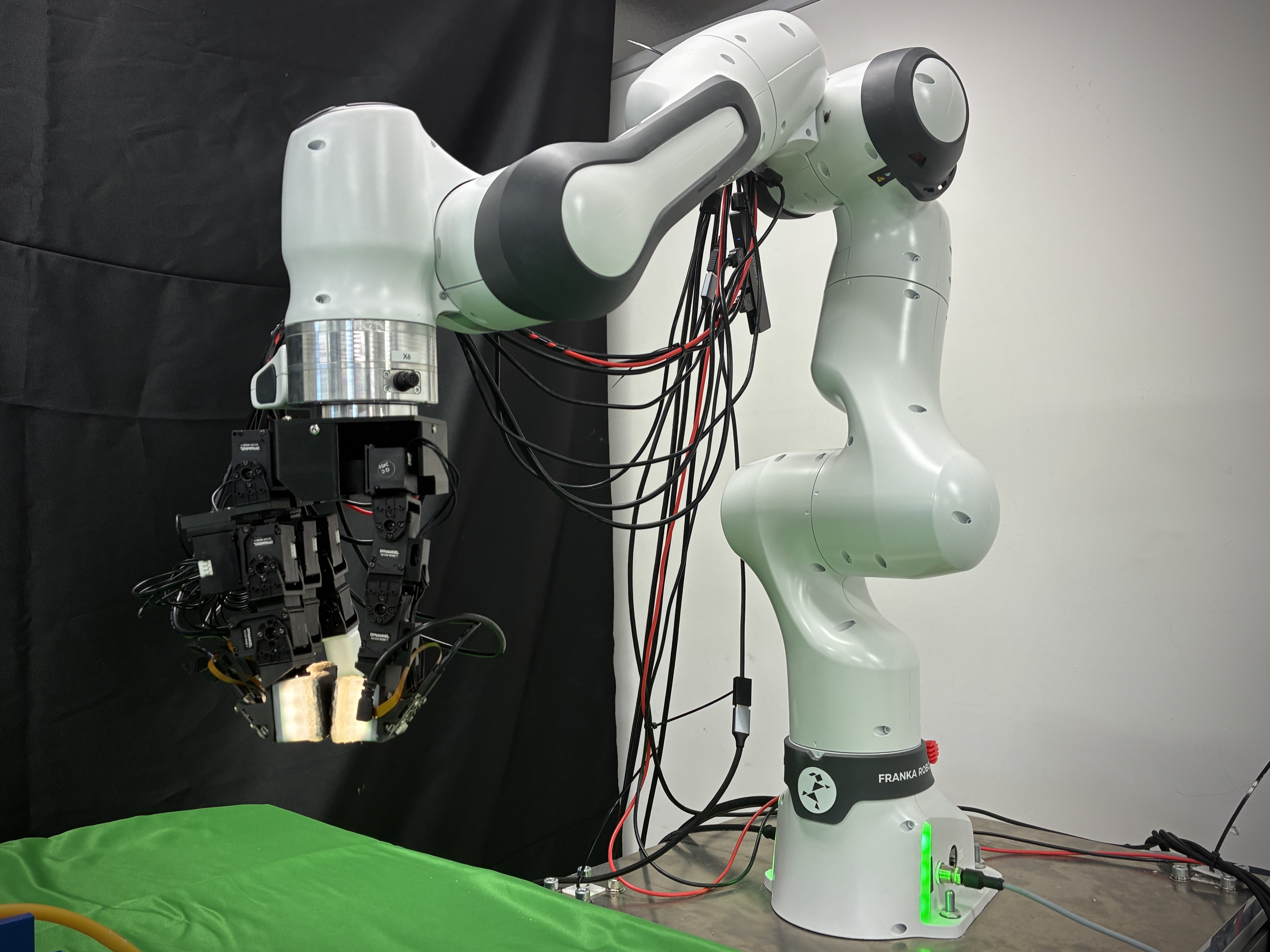
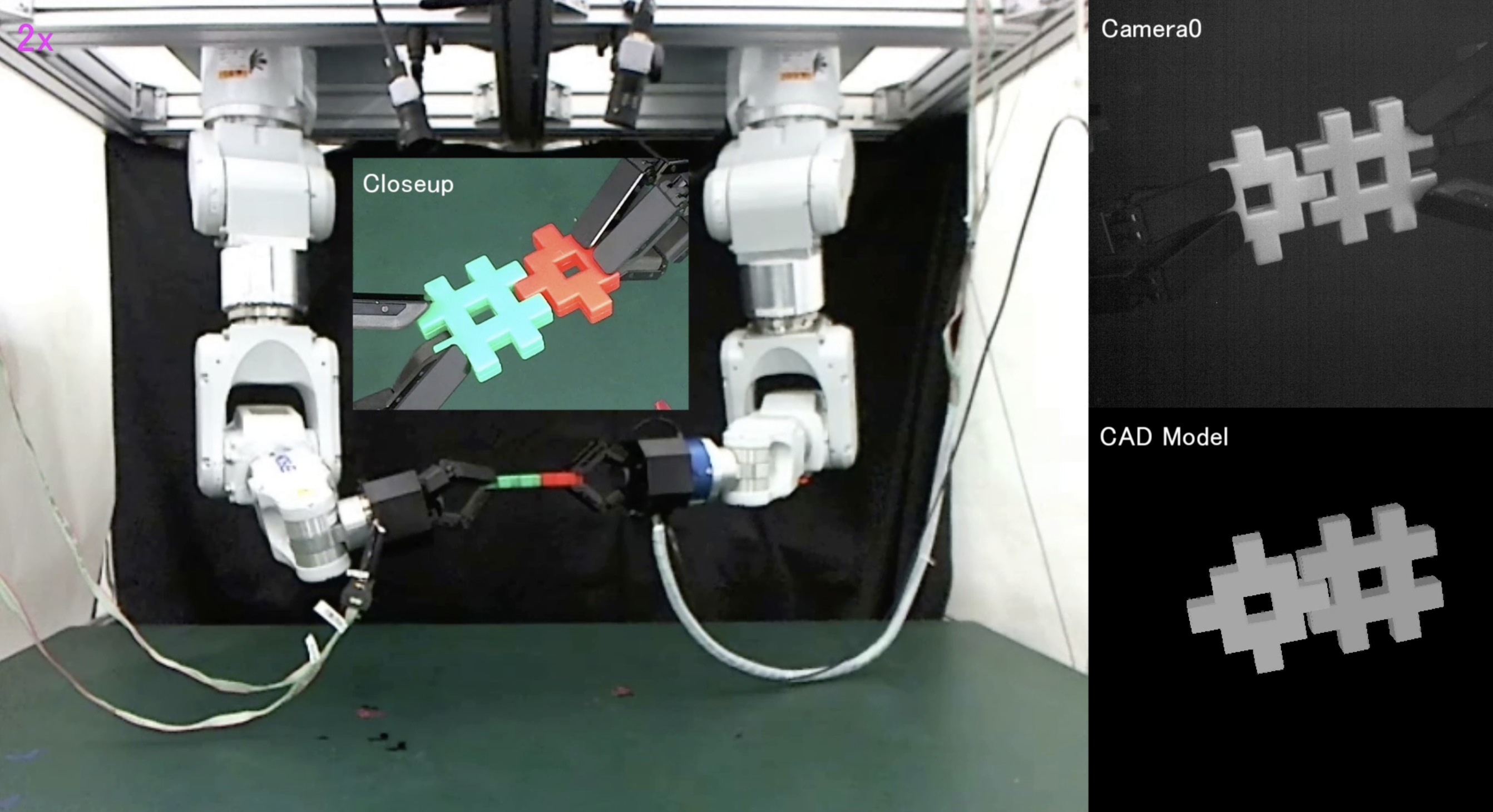
ロボットマニピュレーション
人手不足や省人化の観点から,単純作業をロボットで代替したいという需要は大きい一方,物体のばらつきや接触の不確かさのため,人にとって簡単な作業でもロボットには難しい場合があります。
本研究室では,手形(人型)ハンドを備えたロボットアームを人の手の動きと連動させ,人が直接教えた動作データから模倣学習で基本動作を獲得します。さらに,シミュレーション環境で強化学習により性能を高め,実機での調整と再学習を繰り返すことで,継続的かつ効率的な性能向上を目指します。これにより,従来は実現が難しかった作業の自動化や,立ち上げ・保守コストの削減に繋げます。
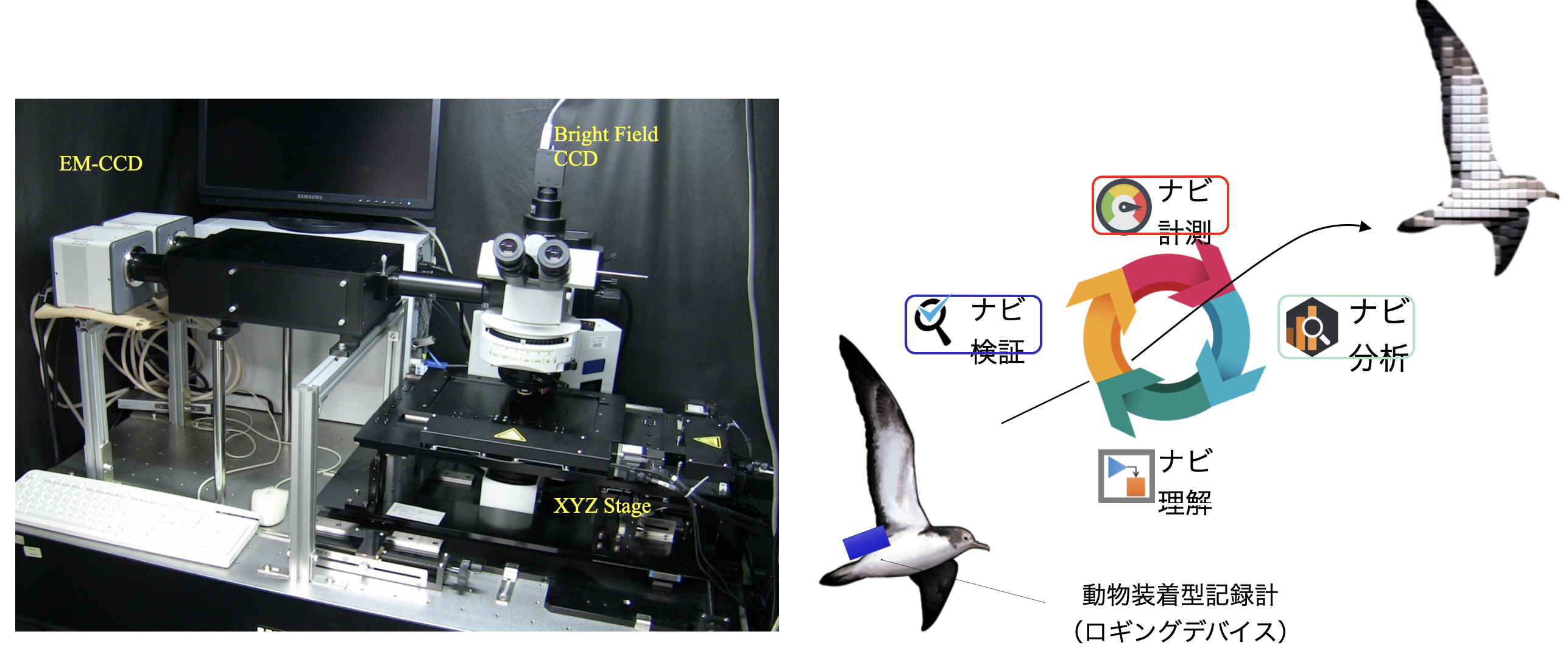
システム生物学と
生物移動情報学
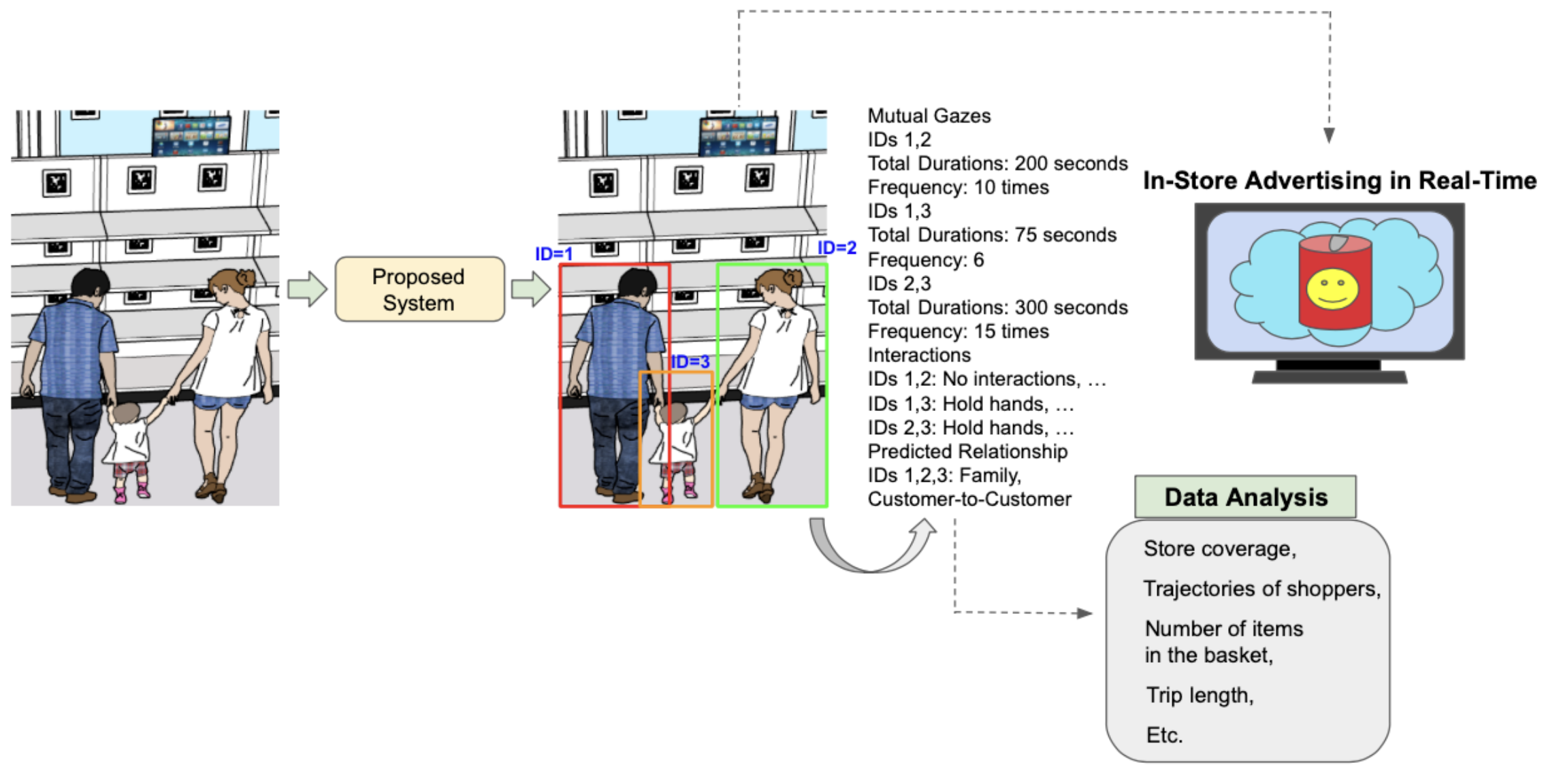
生物の認知行動システムには,人工の認知行動システムと全く異なった動作機構を持つものがあります。本研究室では,生物をシステムとして解析するシステムバイオロジーの立場から,細胞や動物の認知機構,行動機構,記憶機構,相互作用機構,それらに基づく各種生物のナビゲーション機構を明らかにすることを目指しています。